小编语:在2021年举办的英国隧道学会(BTS)年会上,英国的HyperTunnel公司展示了一项新的技术概念:一种结合水平定向钻、集群机器人及多项智能化技术的快速施工隧道法。今年6月,在展示了更多技术细节后,他们获得了来自VINCI的投资,并且在英格兰汉普郡的研发基地开始联络通道的建设试验。这项技术真能如同宣传的那样改变隧道施工的未来吗?本期就让小编带大家一起了解一下。
什么是HyperTunnel?
HyperTunnel隧道施工法与传统隧道施工流程最大区别在于:传统隧道的施工流程是先挖掘土体,然后再建设衬砌。而Hypertunnel的隧道施工流程与传统施工流程正好相反,他们通过一系列特殊工法在地层中先建好衬砌,然后再将其中的土体挖空。
HyperTunnel隧道施工法具体步骤如下:
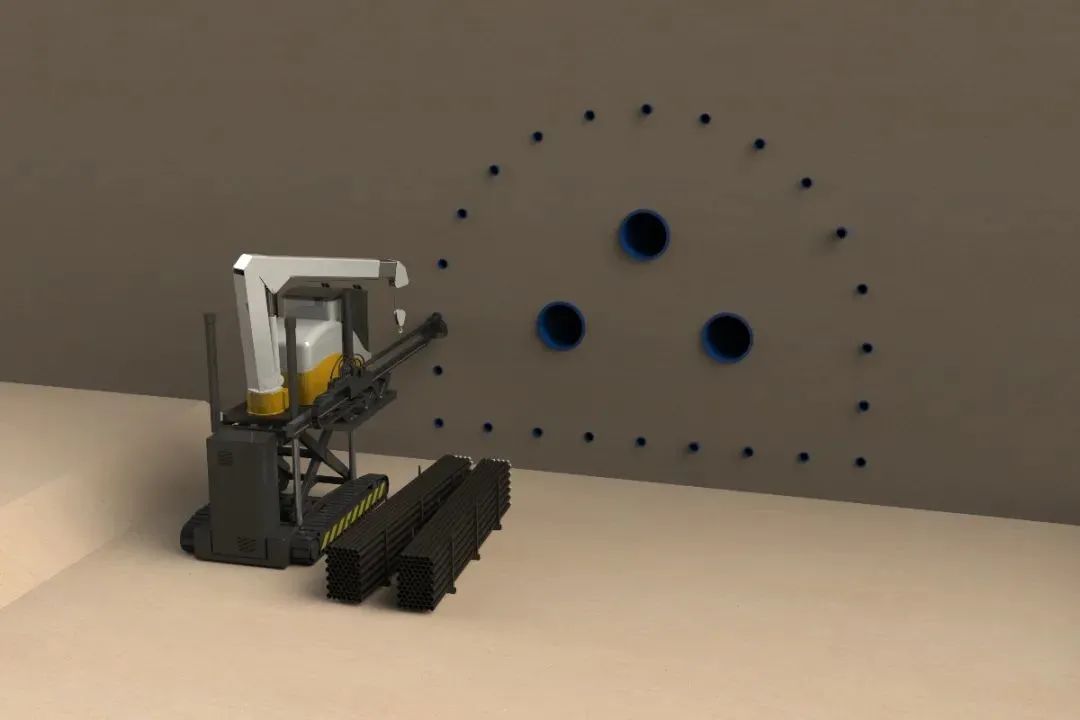
■ 第一步:利用水平定向钻机在隧道断面中心钻出数个原始导向管,完成初步勘探后,按照隧道断面的轮廓和隧道路线钻出一系列施工导向管,这些施工导向管之间的距离取决于地质情况;
由于hyperTunnel隧道施工法对水平定向钻的施工精度有非常高的要求,所以需要采用一些来自石油和天然气开采领域的最新技术,以极高的位置精度引导钻头,确保导向管位置精确。
■ 第二步:利用这些导向管内对隧道施工区域的地质进行完整勘探。通过沿这些导向管运行专用的 3D 探地雷达 (GPR) ,可以获得非常完整且具有可视性的全线地质数据;

利用覆盖隧道全线和整个断面的导向管网络,施工方可以获得的地质信息远比传统沿线进行垂直钻孔能够获得的要多,而HyperTunnel隧道施工法本身也需要非常完整的地质信息。
■ 第三步:大量机器人进入施工导向管,在施工导向管内通过微型钻头向周围的地层中钻孔并注入化学材料,固化后成为隧道衬砌,通过这种“3D打印”的方式形成隧道结构;

■ 第四步:当隧道的结构外壳完成后,将位于断面中心的的原始导向管扩径,以促使壳内的土体向内“塌陷”;接下来通过适合地质和土体条件的技术(例如水力压裂或声波压裂)进一步粉碎土体,然后通过设备将这些弃土清除,再按照隧道要求安装内衬。


HyperTunnel的隧道施工法在提出时,被很多隧道施工人员认为是不切实际的,利用该工法完成隧道施工需要应用大量未被验证,但其技术负责人则表示:他们所用的技术虽然在隧道施工中从未被使用过,但在采矿、石油、天然气、化工和机器人等其他行业中得到过应用和验证。
将设想变为实现的第一步
HyperTunnel隧道施工法中最核心的一环,也是被认为最难实现的一环是机器人施工。想要在施工导向管内(外径初步定为280mm)进行钻孔和注浆作业,必须通过小型机器人才可能完成,而想要有效率地完成一条隧道,可能需要数百甚至数千个机器人在不同的位置同时进行工作。

确保上千台机器人都能够准确的抵达位置,并且在这一过程中,互不干扰是一个难题;同时,由于隧道的长度,这些施工机器人还需要专门的补给机器人配合,为他们运输注浆所用的化学品和提供电力。当施工机器人出现故障时,还需要辅助机器人进行维修或者将故障机器人拖走,这些补给和辅助机器人的运作又是一个需要解决的问题。

HyperTunnel的施工机器人原型
■ 设备内部整合了弃土清理,微型混凝土搅拌和向地层中注射复合建筑材料的能力;
■ 为了让两台机器人在导向管内相遇时能够迅速通过,机器人外部安装了转向轮,在非作业时可以向另一侧转动,两台相向而行的机器人能够以“背靠背”的形式与对方“擦肩而过”,保证隧道内机器人的自由通行。
■ 此外,每个机器人均带有可伸缩的支撑杆,在转动时有效防止机器人倾倒。
为解决控制问题,HyperTunnel以一些近年来用于仓库拣货和包装,以及自动化制造工厂中使用的工业控制软件为基础,对HyperTunnel的施工机器人的控制软件进行了研发。在最近的访谈中,公司宣称他们已经实现了一定程度上的集群机器人控制能力,并大大提升了协调工作的效率。
其他关键技术
HyperTunnel隧道施工法中,除了核心的机器人技术外,还依赖于数项其他类别的前沿技术,其中包括化工,计算机等领域。
施工信息的数字化整合技术:
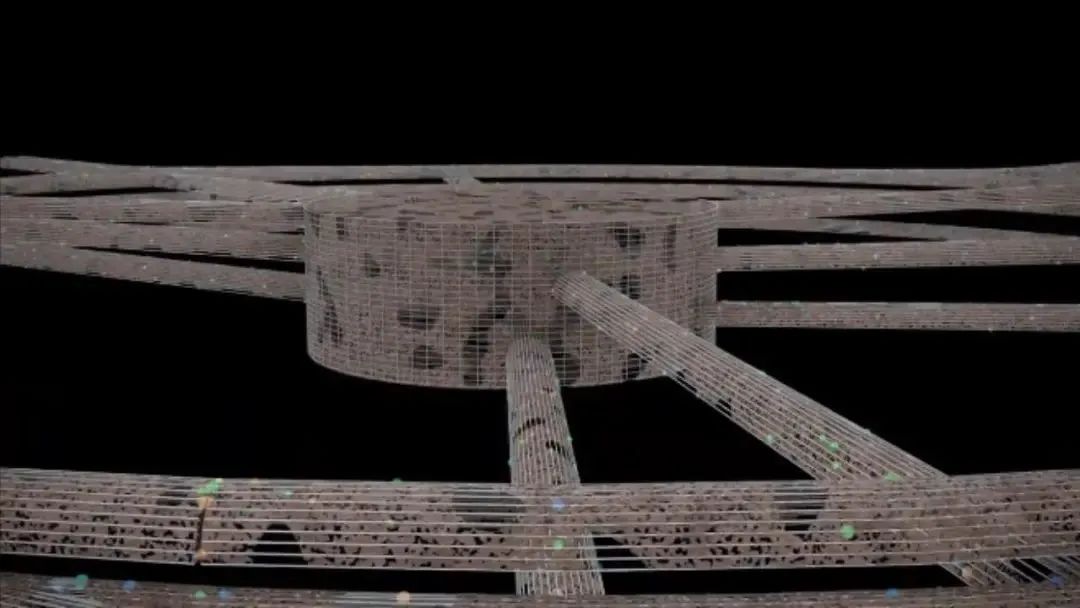
在HyperTunnel的隧道施工法中,以数字化的方式整合整个隧道施工区域的各类信息,是一个必要的步骤,因为施工机器人的控制以及各项施工参数的调整都是以此为基础的。
在整合信息方面,数字孪生和BIM技术的发展起到了关键作用,系统将多层信息整合到一个完全参数化、数据丰富的 3D 模型(数字孪生)中。 该模型可以反映隧道及其周围的地质情况,并由 BIM 进行补充,最终可以呈现一幅非常详细的施工区域模型,包括周围的裂缝、空隙和地下水等地质信息,整个机器人控制系统和施工参数调整系统都将基于这个模型进行运作。
新型混凝土和材料技术:
HyperTunnel的隧道施工法需要使用与传统的隧道建设中完全不同的混凝土或者其他建筑材料,这意味着HyperTunnel需要开发一种适应机器人施工模式的专用混凝土。
对混凝土的要求将取决于机器人的性能和部署机制,HyperTunnel希望通过调整混凝土混合物的性能以优化机器人的注浆泵送能力方面。目前正在研究使用聚氨酯树脂 (PU)、聚脲硅酸盐 (PUS)、丙烯酸树脂和化学改性水泥浆。
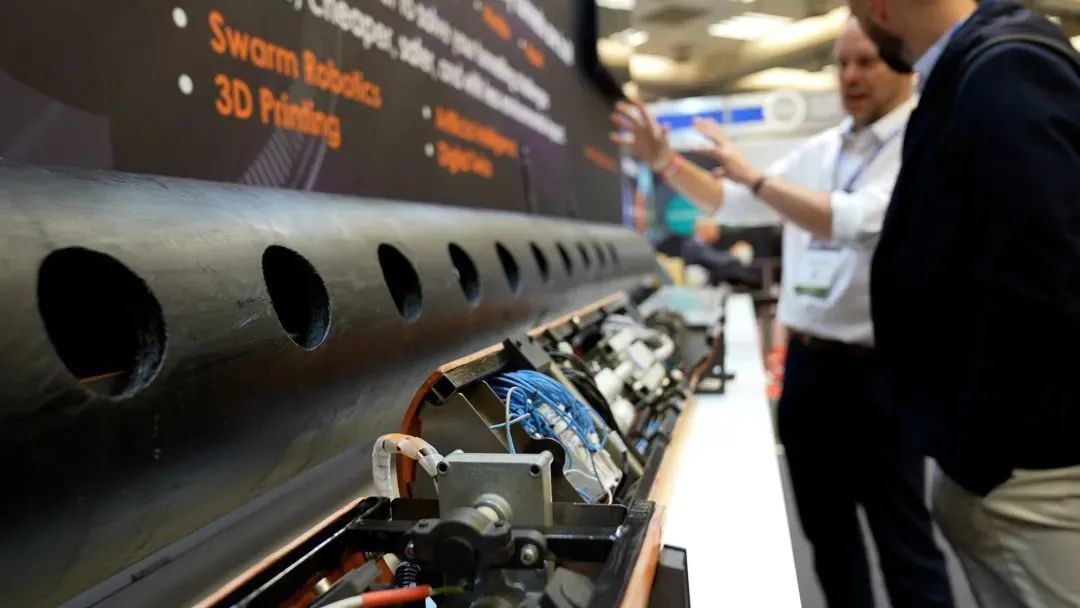
钻孔和注浆的原型设备
HyperTunnel的施工方法,也改变了一些混凝土的其他性能要求,其施工方法可以接受更长的混凝土硬化时间,还可以随时根据隧道路径上不断变化的地质条件改变注射物。这些特性使得工法中所用的混凝土混合物的性能标准更加灵活。
小编语:目前,英国铁路已经与HyperTunnel签订了协议,利用该技术在不中断隧道使用的情况下,维修翻新一部分维多利亚时代的老隧道,这一项目将是HyperTunnel隧道施工法的第一次实地应用,具体效果如何,各项技术是否能够达到使用要求,让我们一起期待!
内容整理自网络