1 概述
在对地铁区间隧道的沉降区域进行注浆修复的施工中,需进行垂直位移自动化监测,而监测的目的就是实时查看隧道修复情况,评定注浆修复对地铁结构的影响,直到满足施工修复要求。同时,若有监测数据出现突变,应及时的通知施工方,对可能发生的事故提供及时、准确的预报,避免恶性事故的发生。
2 工程概况
南京地铁小行至奥体中心区间位于南京河西地区,区间隧道全长约3.9km,东起小行西至奥体中心站,沿河西大街往西北方向走行,有3座地下站(中胜站、元通站、奥体中心站)和1座高架站(小行站)。隧道结构形式为明挖矩形钢筋混凝土双孔隧道,如图1所示。主体结构于2003年底施工结束,2004年2月完成顶板土回填,2005年9月正式投入运营。
自运营以来一直存在着大量裂缝,且仍有缓慢增长的趋势。裂缝形式基本为垂直于行车线路的竖直裂缝。裂缝总体的发展方向是由下部向顶部发展,裂缝往上宽度渐趋变小。裂缝分布于整个隧道区间内,间距0.3~0.8m不等,宽度普遍在0.1~0.3mm。根据沉降监测数据分析,隧道结构发生了较大沉降,需对这些沉降区域进行注浆修复施工。
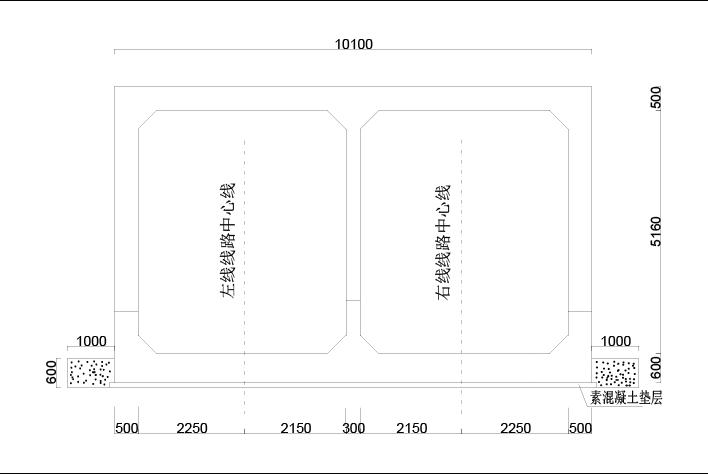
图1 隧道结构断面图
3 试验段施工监测方法
在本次的隧道修复中所使用的自动化监测方法采用高精度全站仪(精度不低于测角精度0.5",测距精度0.6mm+1ppm)和L型棱镜。在沉降区域修复施工前,需先在南京地铁修复试验段进行施工,来验证此方法的可行性,能否满足施工要求。以下就对试验段的隧道修复监测进行介绍。
3.1 监测网的布设
监测网的布设需放置参考基准点、工作基点及监测点。其中,参考基准点为变形监测的起始依据,一般设置1~2个基准点,布设于施工影响范围外的稳定区域;工作基点一般设置1个,布设于中隔墙的稳定区域;监测点每5m设置一个断面,每个断面设置3个监测点。
布设原则为:参考基准点距离工作基点的有效间隔距离为50~90m,参考基准点离工作基点越远,数据越准确,监测点和工作基点的有效间隔距离为15~60m,整个监测网的距离有效距离在65-150m。
试验段监测网布设情况如下:
1)整个试验段修复里程为从K05-832到K05-877,根据布设原则进行监测网布设,如图2所示,2条线代表隧道结构左右测墙。
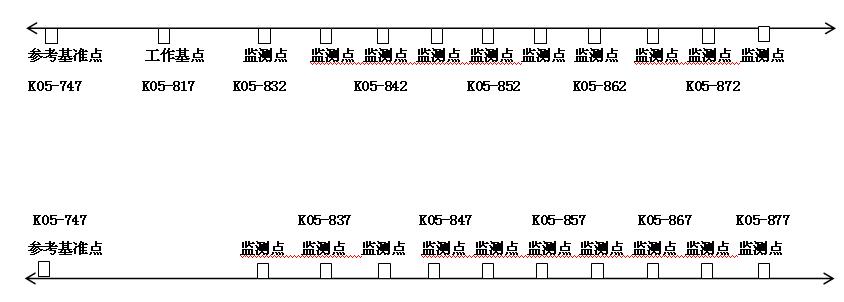
图2 监测网布设示意图
2)在稳定区域内里程号为K05-747布设1个参考基准点组,每个参考基准点组布设2个L型迷你棱镜分别位于隧道结构左右侧墙上的2侧平行布置。
3)在稳定区域内里程号为K05-817布设1个工作基点,位置与任意1个参考基准点保持齐平。安装时在工作基点上安装1个强制对中支架,对中支架采用膨胀螺丝固定,同时全站仪采用铜螺丝固定在对中支架上。
4)在距离工作基点15m,里程号为K05-832开始布设监测点。每5m布设1个断面,每个断面布设3个自动化监测点(ABC),采用L型棱镜,棱镜布设于隧道结构左右侧墙上和道床轨道中间。安装时,棱镜使用膨胀螺丝固定,并且需垂直和紧贴地面或者墙面。自动化断面监测点如图3所示。
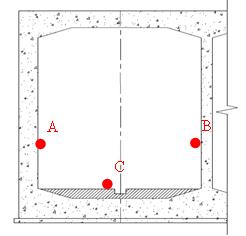
图3 自动化断面监测布点示意图
3.2 自动化监测点的水平位移和高程精度误差分析
自动化监测所得到的数据会存在多方面的误差,其中包含自动化监测点的水平位移和高程上的误差,对此,需要对自动化监测点的水平位移和高程作相对精度误差分析,以确保得到的数据不受这些误差影响。
首先,分析自动化监测的水平位移精度,在工作基点上架设高精度全站仪,采用极坐标法左、右角观测各监测点的水平位移测量,以式⑴计算:

式中:M为监测点的水平位移点位误差; m1为工作基点点位测量误差; m2为工作基点测量监测点的误差。
由于工作基准点位于变形影响范围之外,且采用独立布网的原则,因此只要工作基准点是稳定的,则 的影响可以忽略不计。

由于本项目中的隧道大部分为直线形,因此位移误差可分为横向误差(即垂直于隧道中线的误差,主要受测角误差影响)和纵向误差(即沿隧道中线方向的误差,主要受测距误差影响)。而隧道结构水平位移是指监测点位在水平面内垂直于隧道中线方向的位移,该位移主要受测角误差的影响。因此只需估算监测点的横向误差(mβ)。

式中m 为仪器的测角精度,其含义为全站仪一方向一测回的测角方向中误差,不包括仪器的对中误差。本项目采用强制对中观测平台,由此可不考虑对中误差的影响。由此可得出:

本次角度测量采用左、右角观测,当满足左、右角平均之和与360°的较差小于4"时取其平均值的方法。因此 mβ平=±0.7"。
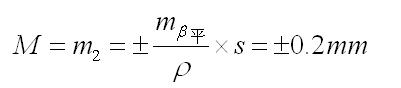
式中 ρ=206265,根据监测设计,工作基点与监测点间的距离为15m~60m。S取最大值为60m时,可将监测点投影到垂直于隧道中线方向的坐标值的测量误差近似看作是由角度测量误差造成的。
其次,自动化监测的高程误差( M高)见式⑷:

1)工作基点的高程误差( M高1)
2)工作基点测量监测点的高程误差( M高2),由于工作基点的高程 M高1一旦确定后只要稳固就不会变化。所以该误差对于监测点高程的相对精度是没有影响的。
根据三角高程计算公式及中误差传播定律:

工作基点与监测点间的距离为15~60m。当测量距离S取最大值为60m时,垂直角α可以控制在 以内;由于采用强制对中和直接埋设观测点,mi 和 mv可以不考虑,ms 根据仪器的精度可以达到 , mα与水平角mβ平一致可以达到 ±0.7",两差改正
其中mk 为折光系数中误差,根据《工程测量规范》[1] 取mk =±0.04 。

可见上述的误差小于合理范围± 0.5mm不影响施工精度。
4、监测数据的分析
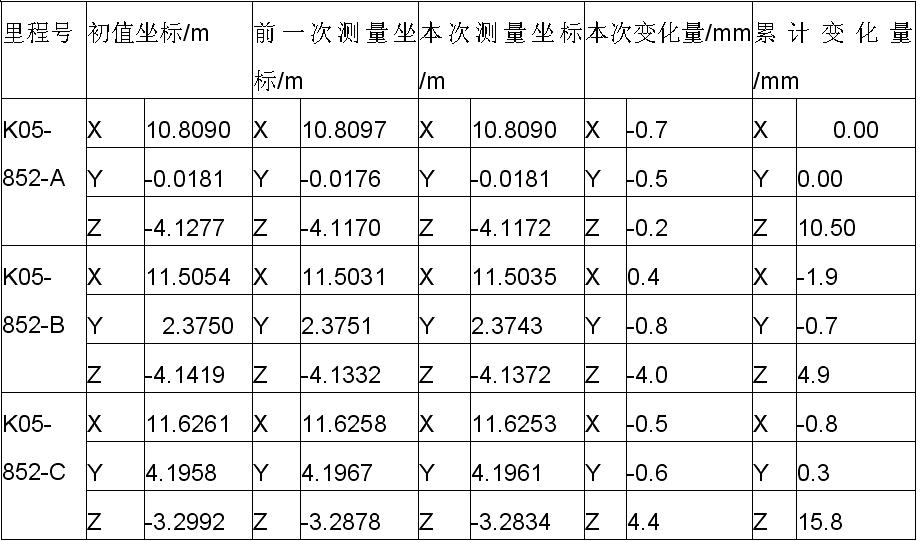
每个监测断面有3个监测点,每个监测点有3个数据,分别为X、Y、Z,其中X为水平横向位移,Y为水平纵向位移,Z为高程位移,如表1,其中本次变化量数据由本次测量坐标上的XYZ相应的减去前一次测量坐标上的XYZ所得,累计变化量数据由本次测量坐标上的XYZ相应的减去测点初值坐标上的XYZ所得。每个监测点注浆间隔时间为3d,需进行多次注浆,以达到施工要求。注浆和监测工作需同步进行,工作人员在工作期间保持紧密联系,监测数据有达到报警状态其中包含单次注浆要求变化达到3mm、累计抬升超过15mm和单次注浆压力达到0.5MPa并且没有抬升都应该立即通知施工人员并停止注浆,如有上述情况,先暂定该注浆点注浆,过3d后再注浆,如还是出现同样情况3次以上就放弃注浆。表1中,在对K05-852监测断面进行第四次注浆发生了在监测点K05-852-B和K05-852-C高程位移单次注浆超过3mm以上,在K05-852-3上累计变化量超过15mm以上的情况,监测人员应及时通知注浆人员暂停在该环上的注浆工作,避免事故的发生。
表1 K05-852监测断面第四次注浆数值分析表
5 结语
在本次南京隧道修复试验段内,修复过程中自动化监测方法采用高精度全站仪和L型棱镜,首先在有限的隧道内,此套设备安装和拆卸简单,方便工人施工。在整个施工期间能够及时和准确为各方人员提供可靠的数据和信息,避免各类可能将要发生的恶性事故,减少各类经济损失。最后此试验段修复效果良好,也没有发生事故,隧道整体抬升了10mm以上。综上所述,此套自动化监测方法可以在后面的南京隧道修复工作中继续使用。
摘自《上海隧道》