0 引言
我国已是世界上隧道修建规模和数量最大的国家[1],盾构施工以其自动化、效率高、成洞效果好等优点得到广泛的应用[2]。隧道盾构施工方法有一定的特殊性和复杂性,对不良地质状况非常敏感,如断层、溶洞、破碎岩体等在施工扰动下极有可能造成突水突泥、塌方等地质灾害,轻则导致盾构刀盘被卡而无法脱困,重则损坏刀盘、引发掌子面失稳及破坏周围环境,造成严重的人身财产损失[3];因此,盾构施工超前地质预报工作显得尤为重要。
目前在TBM施工中取得商业化应用的技术有德国BEAM电法超前监测技术和德国GFZ研发的ISIS主动源地震超前探测技术。在国内,李术才等[4]提出TBM施工隧道前向三维激发极化法超前探测技术,叶智彰[5]将HSP声波反射法应用于大伙房水库特长隧洞TBM施工,周奇才等[6]将探地雷达应用于盾构前方探测等。总体而言,目前的研究热点多集中于TBM施工的地质预报方法,有地震法、电法及电磁法等,而在盾构施工环境下的地质预报手段并不多。其主要问题有:1)盾构占据了隧道掌子面及后方的大部分空间,使预报装置排列十分困难;2)庞大的金属机械系统产生的复杂电磁环境使得电法探测效果不尽如人意;3)机械化的施工方式,其开挖的震动较大,而对于地震类方法,在去噪、提取有用信号方面提出了很高的要求[7]。本文结合北京地铁八号线三期工程六营门站—五福堂站盾构段区间典型的盾构施工环境特征,利用盾构本身机械震动作为被动震源,通过噪声压制及有效波提取,提出采用地震波反射法探测盾构施工前方地质情况的方法及系统[6]。
1 盾构施工超前地质预报技术
本文在USEP21地下工程施工超前地质预报系统的基础上,以盾构本身机械震动产生的地震波作为震源,对开挖面前方地质情况进行探测。通过安装在隧道管片上的接收器预定的时间间隔执行采集工作,用数字滤波等技术压制机械震动产生的特殊干扰,识别反射波中的有效信息,经过数据处理和空间归位,形成盾构前方的三维显示图像,便于技术人员对前方地质信息进行描述[8]。同时,利用Tesseral-2D软件对盾构法施工环境超前地质预报方案进行正演模拟,以论述方法的可行性。
1.1基本原理
本系统基本原理采用地震波反射法,即利用USEP21预报系统将接收到的地震反射波由地震时间剖面转换为深度剖面,相位特性和振幅特性采用的基本方程见式(1)和式(2)。
同相轴方程式[9]为

式中:β为相位移;ψ为传感器与水平面(X,Y)的夹角;ω为传感器轴线的方位角;ω1、ω2为第1、2个震动方位的开始方位角;φ1、φ2为第1、2个震动方向与水平面(X,Y)的初始夹角;A0、B0为初始振幅;β1、β2为起始相位。
1.2系统介绍
本文所涉及的盾构施工超前地质预报系统是由MHHC综合采集器、三分量检波器和USEPWin21上层处理分析软件构成的。
盾构掘进施工时,刀盘滚动切削土体,产生的震动包括刀盘扭转及土体释放带来的扭转震动、侧向阻力不均带来的径向震动以及刀具切削不均匀所产生的高强度冲击等[10],因此,单一分量的检波器难以满足复杂勘察的需求[11]。本文采用多个三分量组成的联合体系作为地震接收器,目的是同时利用所有类型的波(纵波、横波和转换波)来研究介质,从而提高勘探的准确度[12]。
1.3观测系统
观测系统如图1所示。接收器布置:现场选用5个三分量检波器,间距为1.2m(管片宽度),分别布置于两侧拱腰位置,1号三分量检波器距离刀盘22.8m。炮点布置:以刀盘震动为震源(刀盘直径6m),现场用25个单次振动表示震动面。
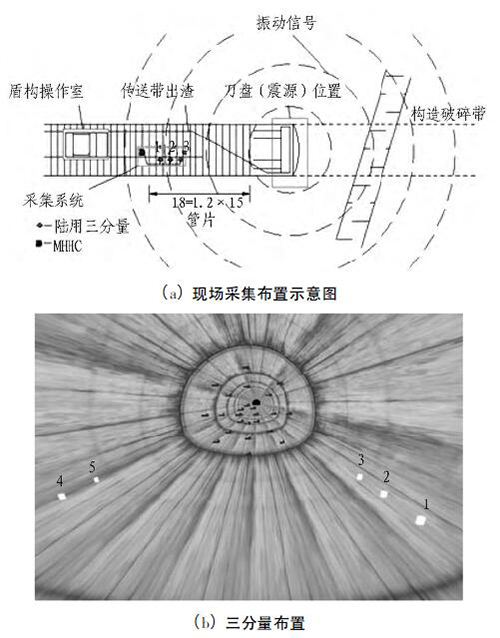
图1 观测系统
1.4操作流程
操作流程见图2。具体流程为:
1)按预设位置及方向安装地震数据接收器,接至数据采集器上,打开系统并完成自检工作;
2)在预设位置及方位实时接收盾构施工过程中由自身机械震动所产生的地震波在遇到反射界面后形成的反射波和透射波,形成地震标准数据文件;
3)实时采集盾构施工过程中工作移动状态下的震动信号数据;
4)对地震标准数据文件以及震动信号数据进行数据处理解析,形成盾构施工前方地质情况的图像,并输出显示。
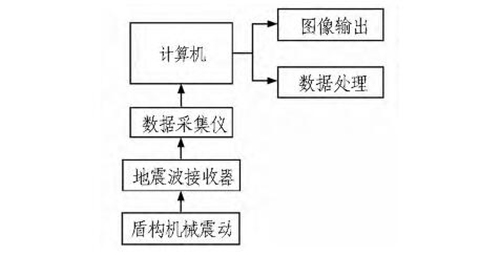
图2 操作流程图
2 软土介质中地震波场正演模拟
模拟采用Teserral2D全波场模拟软件。模拟地质体为500m×500m(长×宽),盾构周边地质为黏土,纵波速度1800m/s,横波波速600m/s,岩体密度1800kg/m3。模拟软弱夹层为黏土,纵波速度500m/s,横波波速200m/s,岩体密度1200kg/m3。软弱夹层位于刀盘前方20m处,模拟高度100m、厚度20m,方向垂直于隧道开挖方向。炮点信息:点震源,炮点为1个,模拟炮点位置为模拟盾构刀盘中心,横坐标x=298m,波传播模式为全方位。接收点位置信息:接收点为5个,水平布置,于开挖隧道侧壁两边左2右3分别布置,同侧接收器距离1.2m、高度2m。实际现场实验时左侧接收器与右侧接收器位置相对应,2对分别布置,右侧多1个接收器是考虑到盾构操作室靠近右侧,现场干扰更大,多布置1个接收器意在尽可能多地采集相关震动信号,为后期数据处理提供更多依据。正演模拟示意图如图3所示。软件计算结果如图4所示。
下面进行道集记录具体分析。为了增强道集记录与波场快照观察效果,道集记录经过50%均衡、20%平滑处理。
1)T1=0.009s时,直达波到达接收器,如图5所示,根据纵波波速计算炮点到接收器的距离为16.2m,实际模拟设置距离为17m,误差为0.8m。

图3 正演模拟示意图

图4 软件计算结果
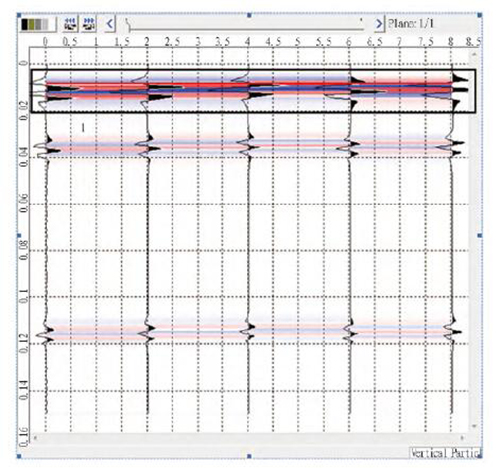
图5 直达波到达
2)T2=0.033s时,软弱夹层第1界面反射波到达接收器,如图6所示。由1)计算可得波场从出发到反射经过接收器传播的距离等于59.4m,则软弱夹层距离炮点距离为21.6m,距离掌子面距离为19.6m;建模设置时,掌子面实际距离软弱夹层第1个介质面为20m,计算误差为0.4m。
3)T3=0.112s时,软弱夹层第2界面反射波信号到达接收器并记录,如图7所示。根据1)和2)可估算出软弱夹层的位置与厚度。
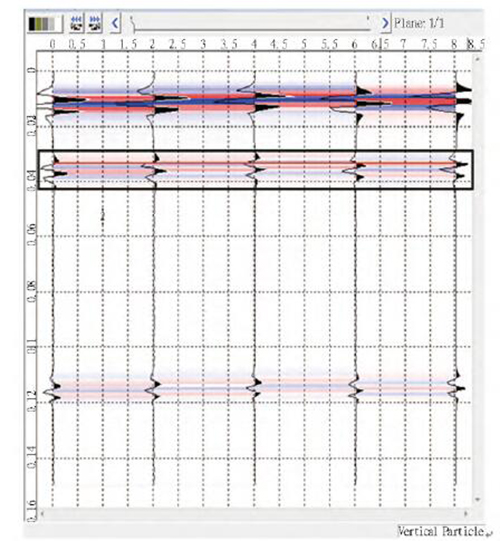
图6 第1界面反射波到达

图7 第2界面反射波信号到达接收器
由计算结果可以发现,道集记录数据可以清楚地观察试验方案采用的观测系统干扰信号很小,接收信号能清楚地反映刀盘震动在软土介质中的地震波衰减情况及遇到软弱夹层之后的传播情况,经过计算能得知软弱夹层的位置与规模。
3 盾构施工工程应用
3.1工程概况
北京地铁八号线三期工程六营门站—五福堂站盾构段区间自六营门盾构井沿南大红门路向南敷设,抵达五福堂站。本段区间位于南大红门路下,区间沿线多为住宅及商业,施工风险包括地下管线及其渗漏引发的空洞、废弃桩基以及飘石等[13]。
3.2现场试验
现场试验如图8和图9所示。对盾构掘进全程进行数据采集,所用设备包括1个MHHC数据采集器、1台野外笔记本电脑、5个三分量检波器、1个震动开关、1个卷尺、若干连线和1个电缆转换接头。

图8 拱腰布置三分量检波器串

图9 现场数据采集
3.3数据分析
3.3.1施工噪声震动分析及典型图谱
在进行盾构施工地震数据采集及分析时,判定刀盘震动为地质预报的唯一有效震源,认为盾构施工作业面地质条件的软硬程度是影响盾构施工刀盘震动水平的最主要因素,并在此基础上进行震动速度分析和地震数据反演,从而对作业面前方的地质情况作出判定与评价;因此,在地震数据分析时,判断震动来源并消除噪声工作就显得十分重要[14]。
现场数据采集工作中,接收到的噪声包括工人锤击(管片拼接)、螺栓紧固、管片安装(旋转)、运渣机车运行、延伸轨排和吊机移动等。
各种噪声的典型图谱见图10—15。1)锤击(管片拼接过程中调整位置时发生锤击,非持续性噪声)图谱特征为:震动幅值突然增大,持续时间短,且分布无规律;2)螺栓紧固图谱特征为:震动幅值较大,正负来回震荡,持续时间较长;3)管片安装图谱特征为:震动幅值大,持续整个采集过程,图谱表现为正负来回震荡;4)运渣机车运行图谱特征为:震动幅值由小变大,持续过程时间较短;5)吊车移动图谱特征为:震动幅值较小,图形一致,持续整个采集过程;6)管片安装结束图谱特征为:震动幅值短时间内减小至低值,图像呈现楔状。
3.3.2数据处理流程
1)根据施工噪声典型图谱,对现场采集的数据进行对比与筛选,将噪声较少的地震文件作为有效数据文件进行后期处理。
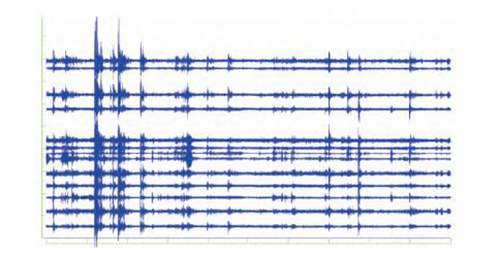
图10 锤击典型图谱
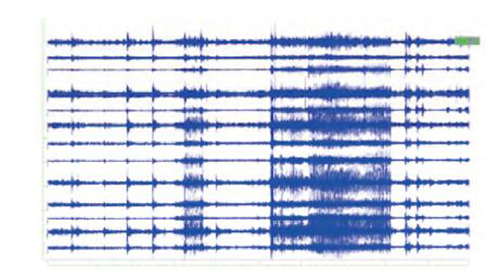
图11 螺栓紧固典型图谱

图12 管片安装典型图谱
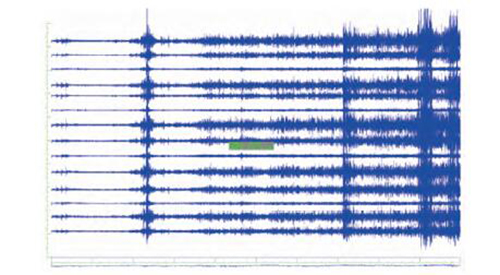
图13 运渣机车运行典型图谱
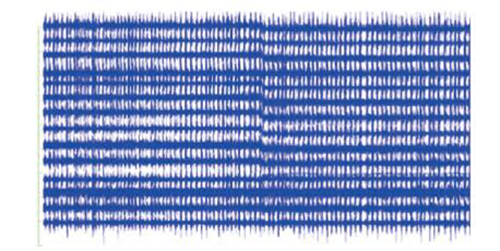
图14 吊车移动典型图谱
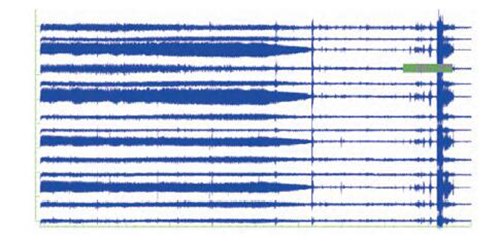
图15 管片安装结束典型图谱
2)数据处理包括三点自相关、四点空域转换、一阶五点圆滑、二阶七点圆滑、三阶七点圆滑、四阶七点圆滑、三阶九点圆滑、能量补偿、球面扩散、平均补偿、均方补偿和频率分析[15],并利用干扰波频率的差异性(如瑞雷面波在15Hz以内、声波大于100Hz)带通滤波。
3)进行多个震动文件的联合成像,形成三维等值面图,结合地质资料对成果图进行图像判译。
4)生成报告。
3.3.3三维成像
3.3.3.1单次激发分析
盾构同一循环内,利用盾构法施工超前地质预报系统进行连续采集作业。随着刀盘的匀速向前推进,相当于不断地、有规律地改变激发点位置,通过观测反射波的波谱改变,进一步确定目标体的位置和形状[9]。
对取得的有效数据进行能量补偿、均方补偿及绕射叠加后,进行三维成像处理。盾构刀盘前方10m内的三维成像如图16和图17所示。
对三维成像及成果进行解释时,红色(黑色)代表正反射(透射),表明地震信号传播的土层较为密实;蓝色(白色)代表负反射(透射),表明地震信号在疏松土层中传播。
测试结果表明:1)刀盘前方10m范围内地质较为均一,中间强反射点处可能为卵石(波速明显增加);2)不同空间位置采集的数据在反射强点处,通过多次处理、切割及变换后,反射强点具有可重复性及再现性,且连续变化的规律较为一致;3)盾构法施工超前地质预报系统的实时、多次采集方法具备可靠性。
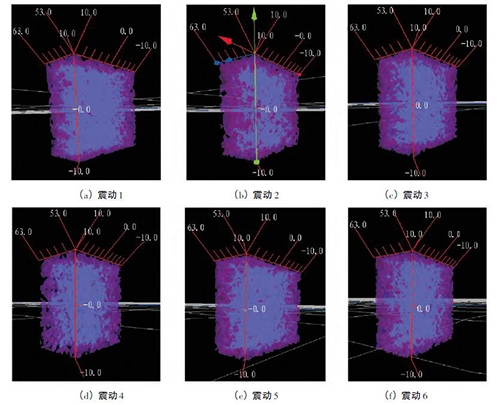
图16 连续采集数据对比(三维等值面图)(单位:m)
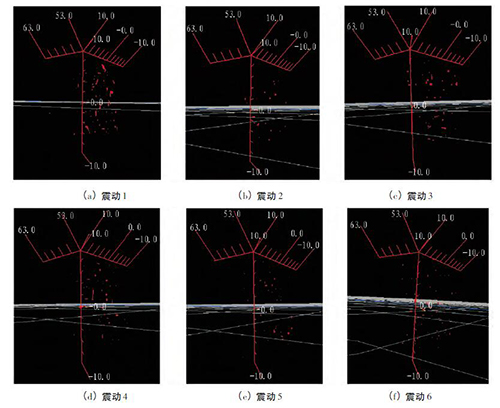
图17 连续采集数据对比(强反射点抽取)(单位:m)
3.3.3.2联合处理
利用USEPwin21软件将连续采集取得的25个单次文件进行联合叠加,得到的三维成像图、强反射点抽取及矢量图如图18—20所示,现场实际开挖土体如图21所示。
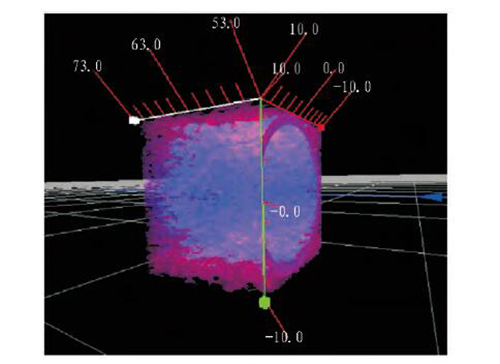
图18 三维成像图(单位:m)
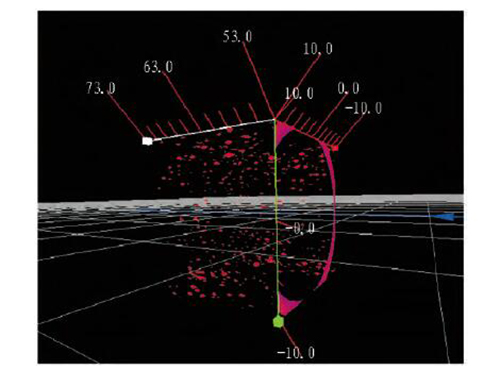
图19 强反射点抽取(单位:m)
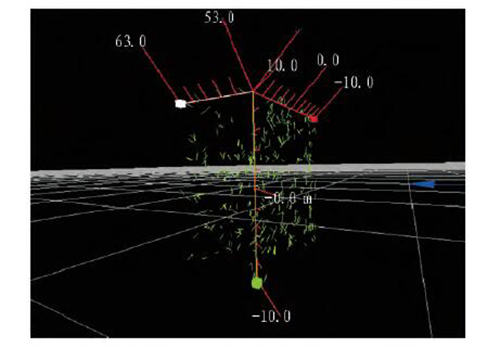
图20 矢量图(单位:m)
多震源文件的联合叠加处理,可以起到压制干扰波、提高信噪比、消弱多次反射波及频率滤波的作用。通过实时采集和单次采集联合使用,以期获得更好的预报效果。

图21 开挖渣土(黏土)
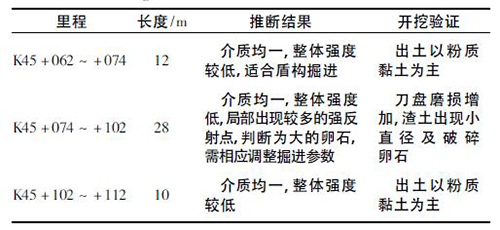
图像判译:1)多震源文件的联合处理与单震源相比,图像更为精细,二者结果具有一致性;2)刀盘前方20m范围内反射整体较为平均,下部反射更强烈一些,同时局部有强反射点。结合场地条件及地勘资料,开挖面前方土体以粉细砂与粉质黏土为主,下卧地层以卵石为主,地质整体上较为均一,说明探测结果与地质资料较为一致。多次探测结果与开挖验证地质情况见表1。
表1 六营门站—五福堂站掌子面K45+062前方50m地质预报
北京地铁八号线六营门站—五福堂站盾构段区间震动试验表明:1)采用盾构法施工的隧道进行的超前地质预报系统布设简单、操作方便,且不影响作业面推进;2)本系统能较好地反映地下介质体的形状与轮廓,图像判译结果基本与勘察资料吻合,并与开挖跟踪结果一致。
4 结论与讨论
盾构掘进过程中的地质预报技术目前大多都停留在理论阶段,距离实际工程应用还较远。本文提出的以盾构掘进过程中机械震动为震源信号进行地质预报的方法,取得了一定的阶段性成果。
1)采用正演软件对现场试验方案进行模拟,有效地解释了在遇到不同介质面时的地震波反射特征,信号数据对实际采集数据有一定的参考意义。
2)试验采集到的数据图谱高低频混杂,现场噪声干扰对数据影响巨大,后期进行有效信号的提取与处理时必须多角度多方法组合尝试。本文采用一致性对比,合理解释地震图谱的规律特征,经过联合处理后的三维图像能初步解释周围地质信息与实际开挖地层地质信息基本吻合。
3)本文提出的地质预报方法适用于盾构法施工短距离的预报(探测刀盘前方20m、掌子面周围约10m范围),进行长距离地质预报有一定的困难,需要进一步的研究开发,在系统设备不断完善之后,再应用于盾构法施工长距离超前地质预报工作。
摘自:隧道建设