0 引言
随着地铁隧道及地下空间建设的全面展开,盾构施工得到了越来越广泛的应用。盾构推进系统主要完成盾构前进、姿态纠偏、调向等运动,其控制性能决定掘进路线的精度和刀盘使用寿命[1]。土层环境的复杂性和负载时变性等因素对盾构推进系统控制及隧道施工质量影响较大[2]。因此,推进系统的控制成为盾构施工的难题。
国内外已有许多学者对推进系统的控制策略进行了研究,如: 龚国芳等[3]运用模糊PID 控制的方法,研究了在该控制策略下盾构推进速度的响应特性; 刘国斌等[4]提出神经网络控制结合推进速度的数学模型,说明了该控制方法的有效性; 施虎等[5]设计了推进系统单神经元PID 控制器,实现了推进速度的自适应控制; 周如林等[6]将专家系统和PID 控制相结合,设计出推进系统区间内同步控制器; 胡国良等[7]通过PLC编译主从式同步PID 控制程序,并进行了试验验证。现有的研究成果大多集中在对盾构推进速度适应性的研究,但是对推进压力和推进速度相互影响的研究较少。
本文将BP 网络PID 控制策略应用于盾构掘进速度压力复合控制中,分析盾构在变负载和变流量的工况下,推进系统的压力和速度的控制特性。
1 盾构液压推进系统
盾构推进油缸采用分区控制,通过调整各区油缸的推进速度、压力来满足盾构施工中的转弯、曲线推进、方向纠偏和直线行进等要求[8]。在各区某缸体内置位移传感器和压力传感器,能实时反馈盾构在实际工况下的掘进参数,通过反馈信号与给定信号产生的偏差来控制比例阀,满足压力和速度连续在线可调的要求[9]。
盾构单组推进系统的液压原理图如图1 所示,推进系统主要由推进油缸、比例溢流阀、比例调速阀、插装阀、换向阀、位移传感器和压力传感器等组成。盾构在正常推进时,插装阀均保持关闭状态,压力油经过调速阀9 进入推进缸,活塞杆顶紧管片,迫使刀盘向前顶进。比例溢流阀8 根据压力传感器10 检测的外负载与压力指令信号的偏差值,在线调整推进压力。通过位移传感器12 检测到的反馈信号与给定速度信号的偏差值,改变节流阀的开口大小可改变系统的流量,从而实现推进速度的闭环控制。快速回退时,电磁阀2. 1和2. 2 左移,电磁换向阀6 处于左位,比例调速阀9 被插装阀3. 1 短路,系统进行大流量供油,实现油缸的快速回退。
2 推进系统BP 网络PID 控制
由对推进系统的分析可知,各区液压缸协调和同步运动影响盾构实际掘进的精度,改进系统压力流量控制器是优化系统控制性能的主要方法。盾构施工环境发生突然变化时,PID 控制器无法根据实际工况实时调整符合要求的控制规律,姿态控制的动态性能和稳定性变差[6]。为解决上述问题,利用BP 网络非线性函数的逼近能力对常规PID 控制器进行优化,经过网络反复学习和训练,快速获得符合当前环境下的控制参数,当外界环境变化时,网络能够快速进行参数的再次寻优[4]。由于该控制策略具有在线调整kp、ki、kd( kp、ki、kd为PID 控制器比例、积分、微分系数) 的优势,特别适合盾构在实际工况下负载时变非线性、滞后性等复杂的控制系统。盾构推进系统速度和压力的BP 网络PID 控制结构如图2 所示。
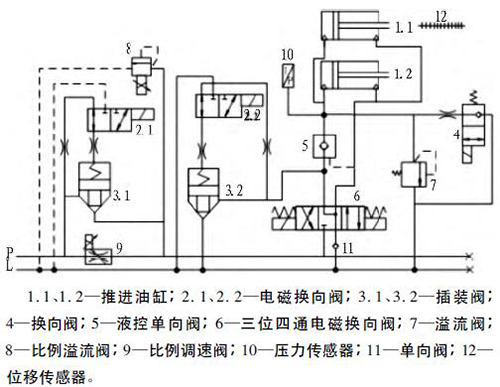
图1 单组液压推进系统原理图

图2 BP 网络的PID 控制器
2. 1 增量式PID 控制器
常规增量式PID 控制器控制表达式[10]为:

式( 1) —( 2) 中: u( k) 、u( k - 1) 为第k、k - 1 次采样时调节器的输出信号; e( k) 、e( k - 1) 、e( k -2) 分别为调节器在k、k - 1、k - 2 次采样的偏差值; Δu( k) 为输出信号增量。
2. 2 BP 神经网络
根据盾构推进系统建立3 - 5 - 3 型BP 神经网络模型,将PID 控制算法加入到BP 网络模型中。通过网络反复学习和训练输出理想的控制参数[11],取某一时刻盾构速度或压力的设定值r( k) 、推进速度或压力的实际值y( k) 、设定值与实际值之间的偏差e( k) 作为模型输入,如图3 所示。BP 网络第2 层的输入、输出为:


式(3) —(4) 中: H( 2)i为隐含层神经元的输入; wij为前2 层神经元之间的连接强度; Xj为输入层节点的输出; N( 2)i为隐含层某节点的输出。

图3 BP 网络的PID 结构
网络第2 层的激励函数采用对称的sigmoid 函数

式( 6) —( 7) 中: H( 3)l为网络第3 层的输入; wli为第2层节点到第3 层节点的连接强度; N( 3)l为第3 层神经元的输出。
隐含层的输出是kp、ki、kd,因此该层的活化函数使用非负的sigmoid 函数

式中: r( k) 为第k 次采样输入信号; y( k) 为第k 次采样输出信号。
权值的学习算法采取附加动量的梯度下降法,有效地解决收敛缓慢的问题[12]。
网络第3 层权值的修正算法为

网络第2 层权值修正算法为

式( 10) —( 11) 中: α 为惯性系数; η 为学习速率。
3 联合仿真
3. 1 建立控制系统模型
利用Simulink 建立BP 网络PID 控制器结构模型,在仿真框图中使用S 函数来编写BP 网络PID 的算法程序。控制器输入端分别是盾构推进系统压力流量的设定值r( k) 和实际值y( k) ,经过BP 网络PID 控制器在线计算,在输出端获得控制规律u( k) 和控制器参数,如图4 所示。

图4 BP 网络控制器仿真结构
3. 2 建立电液比例阀模型
比例调速阀的工作原理是通过调节作用在电磁铁上的电压信号,改变推动阀芯运动的推力,从而满足系统推进压力的线性变化[13]。同理,比例溢流阀通过线性变化的电压信号,改变阀芯开口量大小,进而为系统提供呈线性变化的流量。
利用AMESim 软件自带的HCD 库设计出比例调速阀和比例溢流阀的物理模型,并对比例调速阀进行特性仿真,如图5 和图6 所示。由图可以看出,通过HCD 库建立的比例阀模型与输入的电流信号大体呈线性关系,说明具有较好的控制特性。
3. 3 系统联合仿真
建立推进系统物理模型和BP 网络PID 控制模型后,在AMESim 中创建与Simulink 的接口模块,实现液压系统AMESim 模型与Simulink 模型的连通[14 - 15]。推进系统联合仿真的AMESim 模型和Simulink 模型见图7 和图8。通过联合仿真,综合利用AMESim 和Matlab 各自在仿真模型中的优势为盾构推进系统提供完善的仿真环境。
4 仿真结果分析
4. 1 流量变化,负载不变
系统仿真参数设置为: 推进负载为600 kN; 调速阀的流量在0 ~ 5 s 为1. 256 L /min,5 ~ 10 s 为1. 884L /min。BP 网络参数设定为: 网络学习效率为0. 20,惯性系数为0. 05,仿真时间10 s,采样时间0. 02 s。其他各参数设置完成,即可对推进系统进行联合仿真。图9 和图10 分别示出采用常规PID 控制和BP 网络PID 控制时推进速度和压力的仿真曲线。

图5 比例调速阀和比例溢流阀AMESim 模型

图6 比例调速阀控制特性曲线

图7 推进系统联合仿真的AMESim 模型

图8 推进系统联合仿真的Simulink 模型

图9 常规PID 速度和压力曲线( 流量变化,负载不变)

图10 BP 网络PID 速度和压力曲线( 流量变化,负载不变)
如图9 和图10 响应曲线所示,采用常规PID 控制,由于液压缸流量的突变,推进速度经过合理范围内的振荡后,迅速由40 mm/min 达到60 mm/min,系统压力在19. 20 MPa 附近出现小范围的波动。采用BP网路PID 策略后,推进速度经过很短时间调节后达到稳定状态,没有出现超调,系统流量突变对压力波动的影响也减小。采用BP 网络PID 控制系统响应缩短0.4 s 左右,最大振荡幅值减小至原来的1 /2 以内,可见该控制方法具有很好的跟踪性和自适应能力。
4. 2 负载变化,流量不变
该系统仿真参数设置为: 前5 s 时间内,负载为600 kN; 后5 s 时间内,负载为800 kN; 调速阀流量设定1. 256 L /min; 其他参数保持不变。采用常规PID控制和BP 网络PID 控制时的推进速度和压力的仿真曲线如图11 和图12 所示。
由图11 仿真曲线可以看出: 采用PID 控制策略,当推进负载突变时,系统压力经过较小的波动后1.2s内迅速由19.20 MPa 达到25.48 MPa; 但是在5 s 时刻,推进速度的最大值瞬间达到600 mm/min 左右,出现严重超调,速度控制性能变差。产生该现象的原因是推进系统负载瞬间的突变导致油缸流量跟随骤然发生变化,对速度影响较大,常规PID 控制不能满足速度控制精度的要求。

图11 PID 控制速度和压力曲线( 负载变化,流量不变)

图12 BP 网络PID 速度和压力曲线( 负载变化,流量不变)
采用BP 网络PID 控制策略,速度幅值减弱至50mm/min 左右,0. 4 s 后快速恢复到原来的稳态值40mm/min,大大减弱负载突变对系统速度的影响。可见,BP 网络PID 控制更适合应用于某些外界负载和干扰等因素时变的控制系统,具有很好的鲁棒性。
5 结论与讨论
1) 基于BP 网络PID 控制器,能够根据盾构推进负载不同状况,在线调整控制参数,有效地提高盾构推进压力和速度控制精度,自适应能力强,稳定性好。
2) 常规BP 神经网络控制存在一定的局限性。由于网络权重矩阵初始化设置问题严重影响着盾构推进速度和压力的控制效果,如何优化BP 网络初始化权值有待深入讨论。
3) 采用该控制策略有效地削弱了盾构施工中模型摄动和地质工况时变等不确定因素的干扰,为今后复杂地层中盾构推进系统的研究设计提供了一定的理论参考。
4) 盾构推进控制系统可采用多种控制策略,本文对BP 网络与常规PID 相结合的控制策略展开研究,建议进一步采取多种先进控制方法组合的方式对推进系统进行理论分析,以实现推进参数的精确控制。
摘自:隧道建设